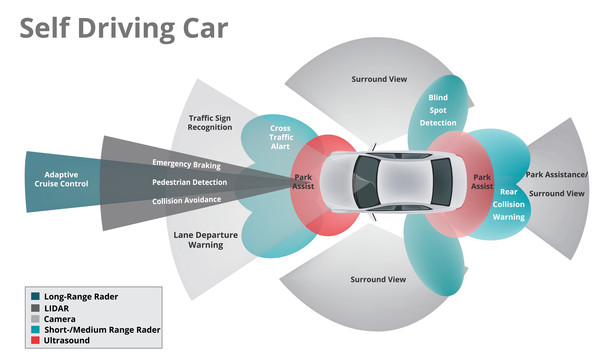
자율주행자동차는 인간의 개입 없이 스스로 주행하는 기능을 갖춘 차량을 말합니다. 이 차들은 다양한 센서, 카메라, 레이더 등의 기술을 사용해 주변 환경을 감지하고 분석해 주행을 제어합니다. 이번 포스트에서는 자율주행차의 작동 원리와 기술 개요에 대해 알아보겠습니다.자율주행차의 동작 원리는 크게 센서, 데이터 처리 및 분석, 제어 시스템으로 나눌 수 있습니다. 센서는 자동차 주위의 환경을 검출하는 역할을 합니다. 주로 사용되는 센서에는 카메라, 레이더, 리다(LiDAR) 등이 있습니다. 카메라는 시각적인 정보를 제공하고 레이더는 주변 객체의 거리와 속도를 측정합니다. 리다는 레이저를 사용하여 주변 환경을 스캔하고 거리와 위치 정보를 제공합니다.
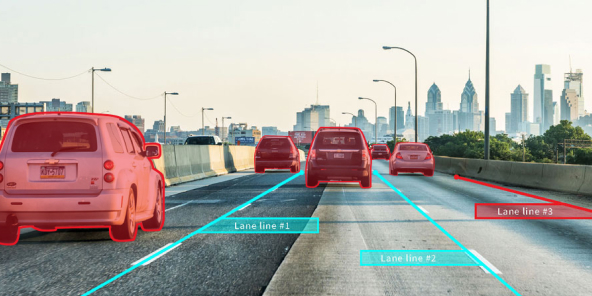
검출된 데이터는 데이터 처리 및 분석 단계에서 처리됩니다.이 단계에서는, 기계 학습 및 인공 지능 알고리즘을 사용하여 데이터를 분석 및 인지하는 태스크를 실행합니다.예를 들면, 카메라로부터 받은 이미지 데이터를 컴퓨터 비전 기술을 사용하고 도로, 차량, 보행자 등을 인식할 수 있습니다.또 레이더 및 리다데ー타을 사용하고 주변 환경의 거리, 속도, 방향 등을 분석하고 차량의 주행 경로를 결정할 수 있습니다.제어 시스템은 데이터 처리와 분석 결과를 토대로 차량의 주행을 제어합니다.이 단계에서는 핸들, 가속 페달, 브레이크 등의 제어 장치를 사용하여 차량의 운전 조작을 실시합니다.가령 앞의 차량으로부터의 거리가 가까워지면 자동적으로 둔화되거나 정차할 수 있습니다.또 주행 경로를 따랐던 때문에 차선 유지 기술을 사용하여 차량의 방향을 제어할 수도 있습니다.이들 센서 데이터 처리 및 분석, 제어 시스템 기술은 자동 운전 차 개발을 위해서 계속적으로 연구되고 개선되고 있습니다.현재까지 자동 운전 기술은 일부 자동 운전 기능을 갖춘 수준이지만, 향후 연구 개발을 통해서 보다 완전한 자동 운전 자동차가 등장할 것으로 예상됩니다.자동 운전 차는 운전자 개입 없이 스스로 주행할 수 있는 혁신적인 기술입니다.센서 데이터 처리 및 분석, 제어 시스템의 통합을 통해서 주변 환경을 인지하고 주행을 제어하는 원리로 동작합니다.앞으로 더 많은 연구 개발을 통해서 자동 운전 기술이 완성할 것으로 기대됩니다.이들 기술의 진보는 운전의 편리성과 안전성을 향상시키고 도로 교통 시스템 변화를 가져올까요.








![[2024년 최고의 폴더블 스마트폰 리뷰 및 클라우드 스토리지 통합 안드로이드폰 추천]](https://run.changwonri.kr/wp-content/plugins/contextual-related-posts/default.png "[2024년 최고의 폴더블 스마트폰 리뷰 및 클라우드 스토리지 통합 안드로이드폰 추천]")
")
